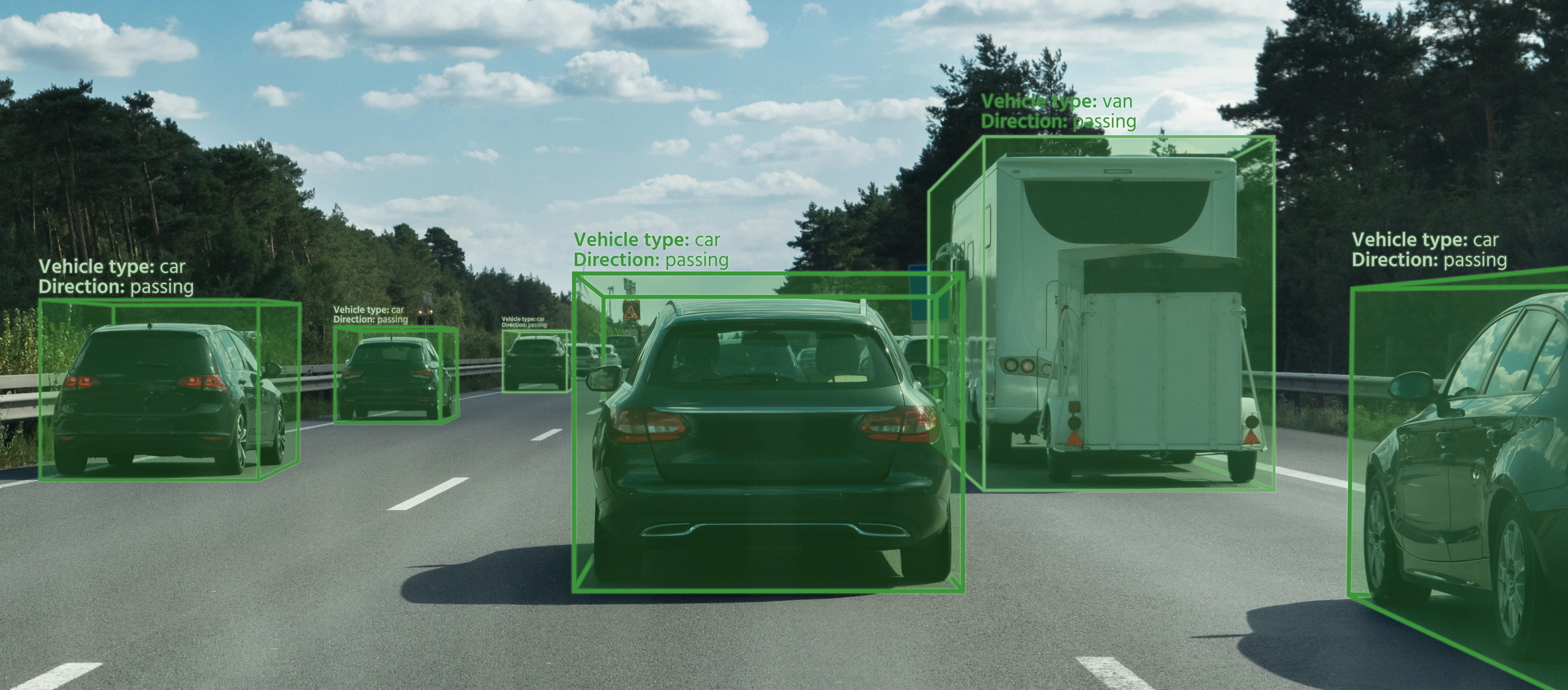
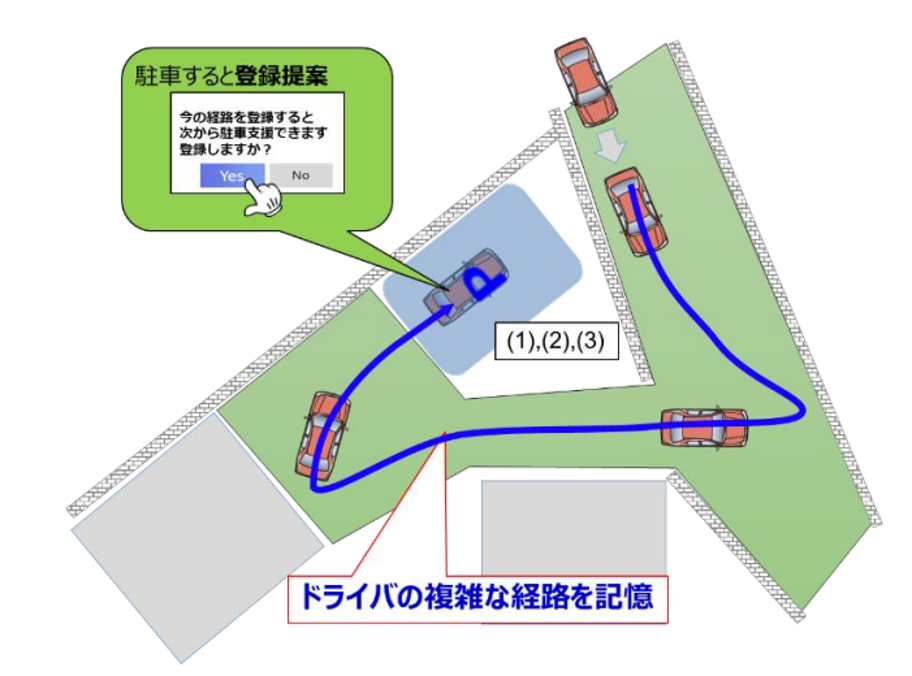
コンピュータビジョン(CV)の扱う領域は幅広いですが、自動運転や自動駐車の実現においては、カメラ画像などのセンサ情報から車両周辺の状況を高精度に認識する技術が特に重要です。例を挙げると、カメラキャリブレーションの精度は、アラウンドビュー映像の合成や、車両・歩行者などの距離推定といった認識精度に大きく影響し、IT LABでも重点的に取り組んでいる分野です。Visual SLAMは、撮影した映像から自己位置推定と地図作成を同時に行う古くからの技術ですが、GPSが不安定な都市部や屋内環境でも車両の自己位置を高精度に推定できる点から、自動駐車、特に長距離自動駐車への応用が期待されています。
一方で、昼と夜など異なる環境(クロスドメイン)間でのロバストなマッチングを実現するために、従来の手法とAI技術の融合も模索しています。さらに、カメラから得られる情報をもとにoccupancy grid(占有格子地図)を推定し、車両周辺の障害物の有無や可走行領域をリアルタイムに認識する技術にも注目しています。
その他にも、IT LABでは生産現場向けのロボットビジョンの研究にも取り組んでいます。分光カメラや多眼カメラなどを活用することで、目視に頼っていた検査工程の自動化や、作業対象を認識・判断して自律的に組み立て・分解を行うロボットが実現できます。
自動運転や自動駐車では、従来は専門業者が収集した高精度地図が使われていましたが、近年は車両のセンサデータから地図を生成する手法が注目されています。
ITLABでは、正確な3D幾何技術と柔軟なAI技術を融合させ、精度と時空間的なロバスト性を両立した3D地図生成技術(幾何・AIハイブリッド技術)の開発に取り組んでいます。消費電力の低減も重要なトピックで、自動車や工場にCVを実装していくために、「効率的なAIの実現」というテーマにも取り組んでいきます。

関連キーワード

コンピュータビジョン分野トップカンファレンス「CVPR 2026」で、デンソー・東京科学大・九大との共同研究が採択 クルマとモビリティ社会全体の未来を見据え、「種」となる先端基礎研究を行う株式会社デンソーアイティーラボラトリ(本社:東京都港…

慶應大学・東京科学大学・京都大学の研究者らを招き、制御工学とAIの融合がもたらす新たな可能性をクロストークで紐解く ■「AI × Control Conference 2025」公式ページ https://sites.google.com/…